Kooperative Funktionen
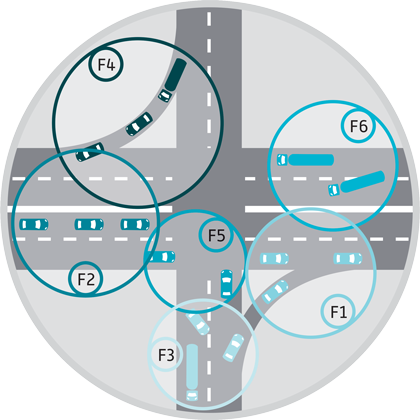
F1
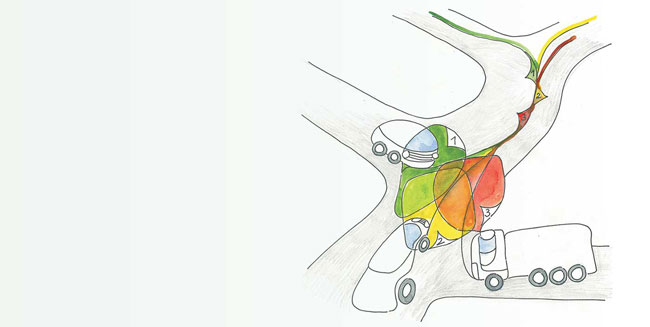
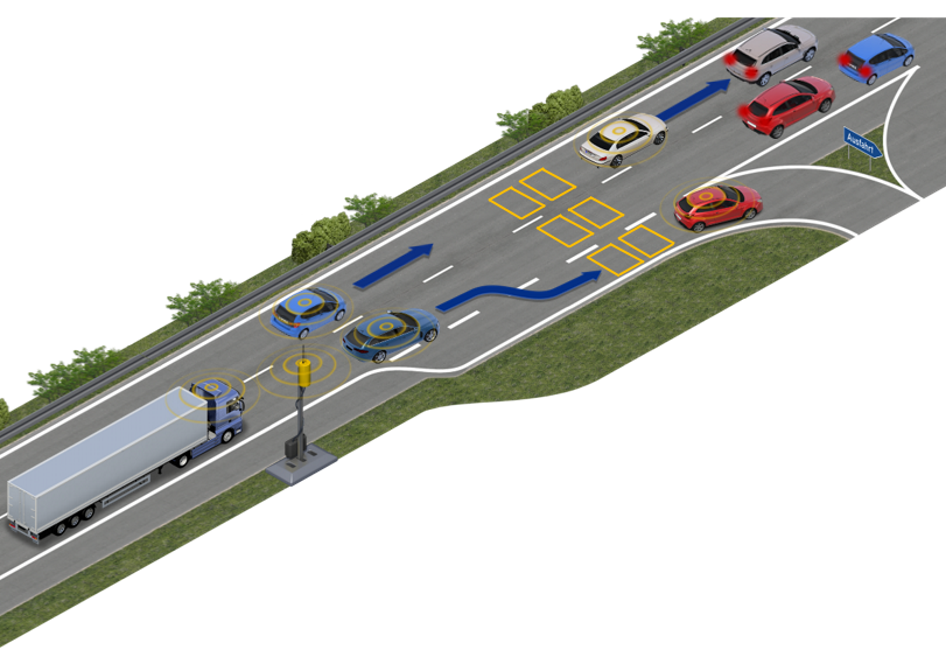
Kooperatives Einfädeln an Anschlussstellen
In Bereichen, wo Fahrspuren enden oder sich verflechten, müssen Fahrerinnen und Fahrer unter räumlicher und zeitlicher Beschränkung Fahrstreifen wechseln. Sie bewältigen dabei verschiedene Aufgaben wie das Suchen einer geeigneten Lücke im fließenden Verkehr oder das Signalisieren einer Spurwechselabsicht, teilweise parallel. Aufgrund der hohen Komplexität dieser Fahraufgabe kommt es an Anschlussstellen häufig zu Unfällen.
IMAGinE ermöglicht auf Basis von V2X-Kommunikation zum einen den Informationsaustausch zu geplanten Manövern der am Einfädelvorgang direkt beteiligten Fahrzeuge sowie die Abstimmung gemeinsamer Fahrmanöver, beispielsweise das Öffnen einer Lücke beim Einfädeln. Damit werden Missverständnisse in der Interpretation der Kooperationsabsichten vermieden und kritischen Situationen wird vorgebeugt. V2X-Kommunikation ermöglicht auch die Erhöhung der Reichweite der bordeigenen Umfeldsensorik. Dies verlängert für das einfädelnde Fahrzeug die Zeitspanne zur Entscheidungsfindung und gegebenenfalls die Abstimmung mit anderen Fahrzeugen.
© Car2Car Communication Consortium
F2
Kooperative Längsführung auf Autobahnen
Aktuelle Längsführungssysteme wie Adaptive Cruise Control (ACC) nutzen fahrzeugeigene Sensorik zur Erfassung vorausfahrender Fahrzeuge und regeln den Abstand durch Beschleunigung und Verzögerung. Die Erfassungsgenauigkeit, Reichweite und Latenz der genutzten Sensorik limitiert die Leistungsfähigkeit dieser Systeme.
Der in IMAGinE entwickelte Ansatz erweitert die Abstandsregelfunktion in Fahrzeugen durch Integrierung zusätzlicher Informationen hinterherfahrender und benachbarter Fahrzeuge sowie der Verkehrsinfrastruktur. So lassen sich zum Beispiel situative Verkehrsinformationen in die Geschwindigkeitsvorgabe der Abstandsregelung einbeziehen. Dadurch können Fahrzeuge ihre Geschwindigkeit vorausschauend an die Fahrsituation anpassen, unnötige Beschleunigungsvorgänge vermeiden und kritische Fahrsituationen entschärfen beziehungsweise ihnen vorbeugen. Die kooperative Längsführung auf Autobahnen ermöglicht durch wechselseitige Abstimmung zwischen Fahrzeugen außerdem die Bildung von Staufolgekolonnen, in denen Fahrzeugen mit verringertem Abstand und synchronisierter Geschwindigkeit fahren.
© Car2Car Communication Consortium
F3
Kooperatives Überholen auf Landstraßen
Auf Landstraßen kommt es immer wieder zu schweren Kollisionen mit dem Gegenverkehr. Diese resultieren unter anderem aus missglückten Überholvorgängen und Ausweichmanövern. Durch ein eingeschränktes Sichtfeld ist es häufig nicht oder nur unzureichend möglich, kritische Situationen rechtzeitig wahrzunehmen und das Verhalten anderer Verkehrsteilnehmer einzuschätzen.
In IMAGinE werden technische Lösungen entwickelt, mit denen Fahrzeuge nicht nur Informationen über ihre eigene Position und Geschwindigkeit, sondern auch Informationen über Objekte in der Umgebung austauschen. So können Fahrerinnen und Fahrer bei einem Überholmanöver vor Gegenverkehr gewarnt werden. Bei einer plötzlich auftretenden Gefahr werden zudem mithilfe kooperativer Planung und Abstimmung Fahrmanöver berechnet, bei denen sowohl das eigene als auch das entgegenkommende Fahrzeug zur Unfallvermeidung beitragen.
© Car2Car Communication Consortium
F4
Kooperativ-strategische Verkehrsverteilung
Individuelle Routenempfehlungen, beispielsweise durch Navigationsgeräte, erfolgen bisher auf Grundlage von Informationen zu Streckenlänge und Reisezeitverlusten. Darüber hinaus stellen Straßeninfrastrukturbetreiber lokal strategische Routenempfehlungen zur Verfügung. Eine Integration dieser Informationen ist nicht immer möglich - im ungünstigsten Fall widersprechen sich diese Empfehlungen.
Mit dem in IMAGinE entwickelten Ansatz wird das Ziel verfolgt, die Verkehrsverteilung im verfügbaren Straßennetz unter Berücksichtigung der vorhandenen Kapazitäten zu optimieren. Auf Basis von V2X-Kommunikation senden Fahrzeuge Daten zum Verkehrsgeschehen auf Haupt- und Alternativrouten an eine Verkehrszentrale. Die Verkehrszentrale fusioniert Fahrzeug- und Infrastrukturdaten, ermittelt eine optimierte Verteilung der Verkehrsströme und sendet die Verteilungsempfehlung zurück ins Fahrzeug. Die Fahrzeuge empfangen die Daten, stimmen diese vor den entsprechenden Entscheidungspunkten auf ihrer Route mit ihren Intentionen bezüglich Ziel und Routenkriterien untereinander ab und berechnen die nutzer- und kollektivoptimierte Route.
© Car2Car Communication Consortium
F5
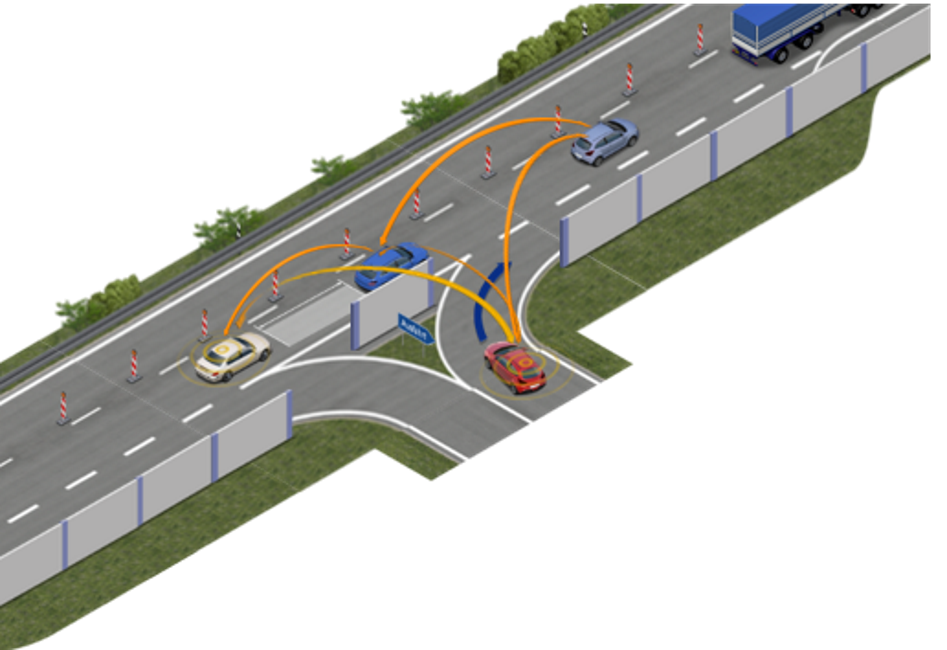
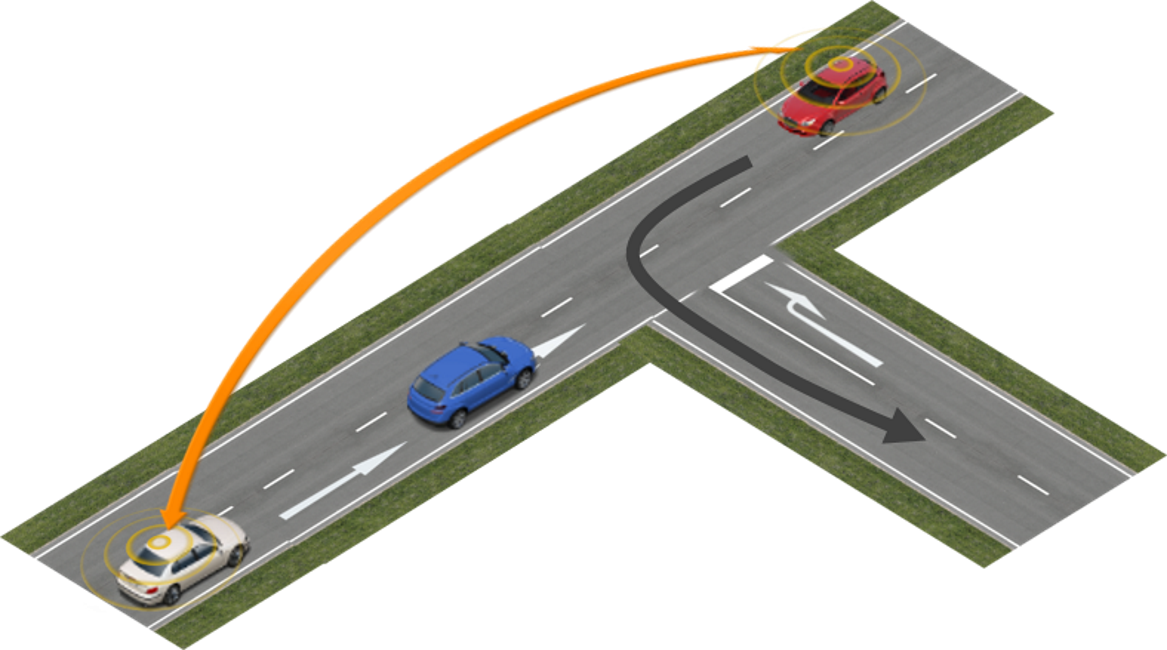
Kooperatives Abbiegen auf Landstraßen
Das Verlassen einer Landstraße durch Linksabbiegen sowie das Einbiegen auf eine Landstraße stellen zwei kritische Verkehrssituationen dar, in denen Fahrerinnen und Fahrer Verkehrsströme aus unterschiedlichen Richtungen beobachten müssen. Derzeitige Fahrerassistenzsysteme, die Fahrerinnen und Fahrer bei der Wahrnehmung der Verkehrssituation und der Umsetzung von Abbiegemanövern unterstützen, stoßen aufgrund ihrer begrenzten Sensorreichweite an die Grenzen ihrer Leistungsfähigkeit. Insbesondere Strecken mit hohen Geschwindigkeiten, Knotenpunkte mit Kurvenverläufen sowie dichter Verkehr sind herausfordernde Einsatzszenarien.
Mit Hilfe von V2X-Kommunikation wird kooperatives Fahren auf Landstraßen ermöglicht: Dies reicht von der Übermittlung eines Abbiegewunsches auf Landstraßen an andere Fahrzeuge – und damit der Erhöhung der Signalisierungsreichweite – bis hin zur gemeinsamen, abgestimmten Planung von Abbiegemanövern.
© Car2Car Communication Consortium
F6
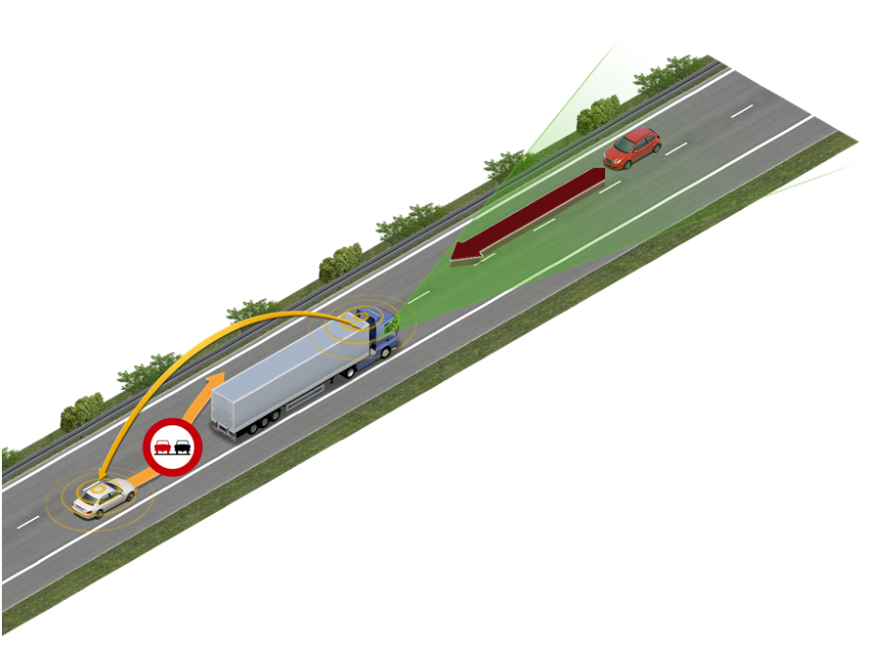
Kooperatives Überholen durch Lkw auf Autobahnen
Die Wahl des richtigen Zeitpunkts für das Überholen eines langsam fahrenden Fahrzeugs stellt eine anspruchsvolle Aufgabe dar. Dies gilt insbesondere für Lkw-Überholmanöver auf Autobahnen. Der richtige Überholzeitpunkt hängt von der Fahrstrategie des vorausfahrenden Fahrzeugs, dem Verhältnis seiner Motorleistung zu seiner Zuggesamtmasse und der Steigung einer Strecke ab.
Die in IMAGinE entwickelten technischen Lösungen erleichtern die Entscheidungsfindung: Sie ermöglichen den Austausch von Informationen über die aktuelle und in naher Zukunft geplante Sollgeschwindigkeit oder das Leistungsgewicht der am Überholmanöver beteiligten Fahrzeuge. Bei hoher Verkehrsdichte können darüber hinaus Daten über Position und Geschwindigkeit des umgebenden Verkehrs einbezogen werden. Auf Basis dieser Informationen können sich Fahrzeuge untereinander abstimmen und Überholmanöver effizienter und auch sicherer für den nachfolgenden Verkehr gestalten.
© Car2Car Communication Consortium